以前お問い合わせいただいたI2CのLCD制御についてご紹介いたします。
この制御は、2つのライブラリで制御が行えます。
・PIC18F4525(2525)、4520(2520)、4585(2585)PIC18F46K22(26K22)用変換ライブラリー
P18F4525-LB
・I2C液晶モジュール(SB1602B、SB1602E)(AQM0802AーRM-GBW)用変換ライブラリー
P452-LC I2C-LB
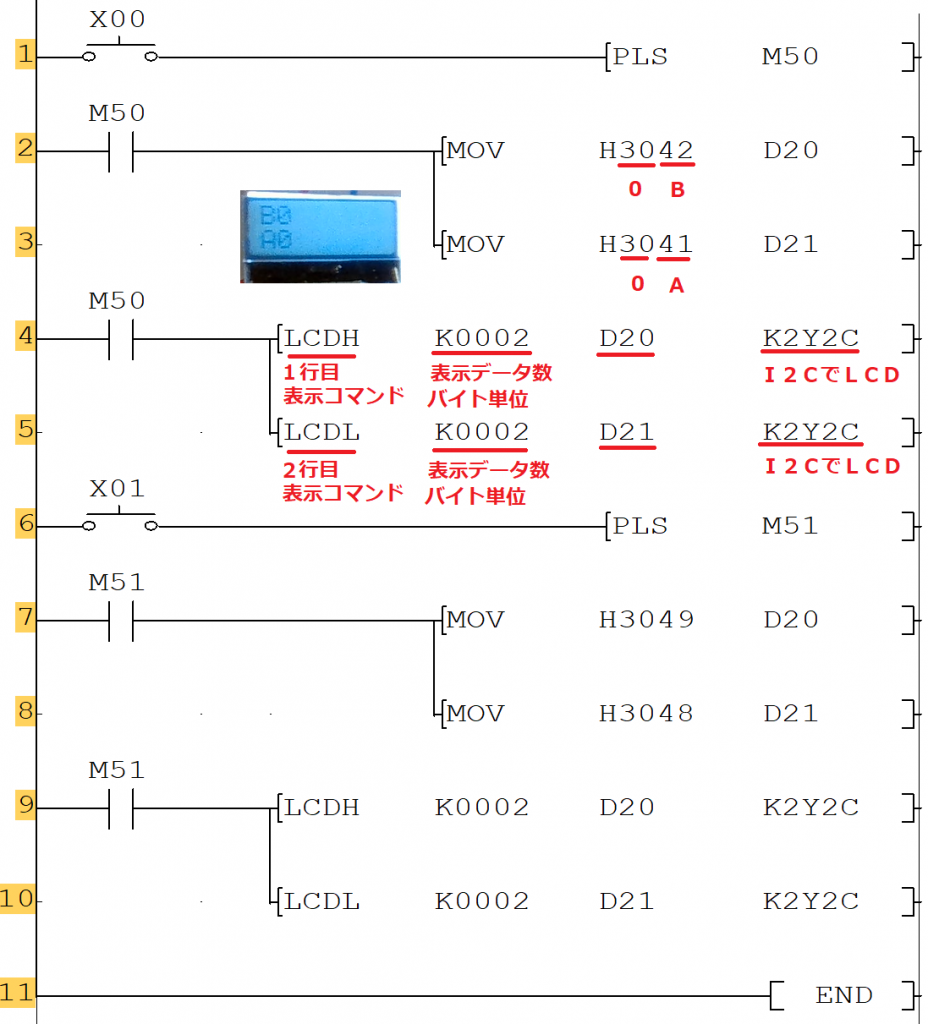
PICに搭載されているI2Cのピン(RC3(SCL)、RC4(SDA))とLCDをつないでいただき、プルアップしてください。
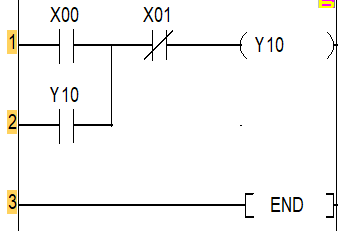
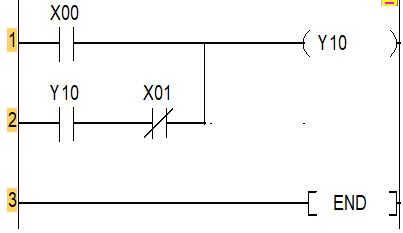
また、ラダーの命令としては、LCDHとLCDLの2つのコマンドを使用して表示内容を指示します。
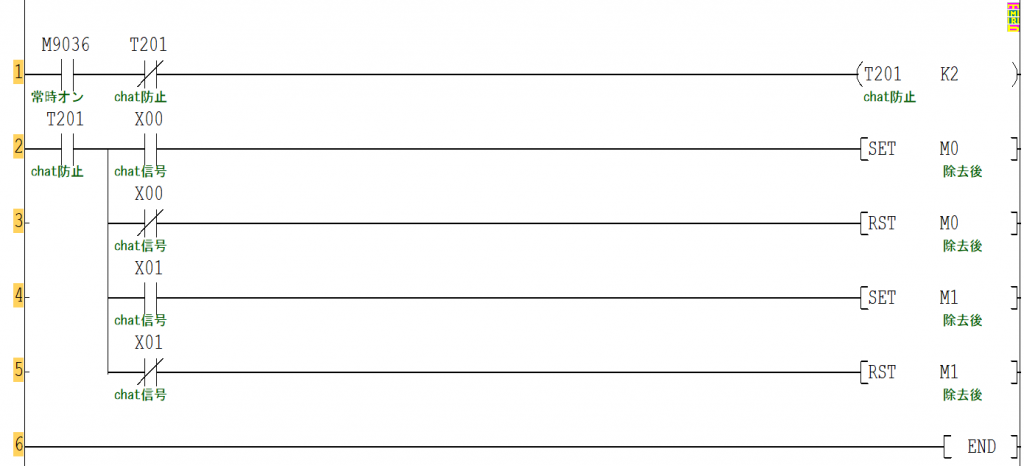
サンプルのラダーの画像を表示します。
注意事項としては、LCDのコントラストの設定が必要になります。しなくても問題ないかもしれませんが必要に応じてライブラリのファイルの設定値を変更してください。(「¥PIC¥8F55¥LCD¥LCDI2CD2.H」内のcontrastの値を変更する)
また、動画で解説しております。下記の動画をご覧ください。