

PLCのプログラムでは大きく分けて以下のような構造になります。
・起動後初期化処理(setup関数)
・マイスキャンの処理(loop関数)
入力の更新処理
出力の更新処理
ラダープログラムの処理
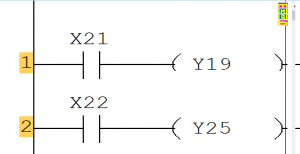
この内容に従い、以下のラダーをC言語のプログラムを
作成しました。
// 入力デバイスに関する設定部
#define X0021 (0x01 << 0)
#define X0022 (0x01 << 1)
#define X0034 (0x01 << 2)
#define X0035 (0x01 << 3)
#define GET_X(DEVICE,NO) (in_data & DEVICE)
byte in_no[] = { 21 , 22 , 34 , 35};
unsigned long in_data ; // 入力Xの保持変数(32点数分)
// 出力デバイスに関する設定部
#define Y0018 (0x01 << 0)
#define Y0019 (0x01 << 1)
#define Y0025 (0x01 << 2)
#define Y0026 (0x01 << 3)
#define GET_Y(DEVICE,NO) (out_data & DEVICE)
#define SET_Y_ON(DEVICE,NO) out_data = out_data | DEVICE
#define SET_Y_OFF(DEVICE,NO) out_data = out_data & ~DEVICE
byte out_no[] = { 18 , 19 , 25 , 26};
unsigned long out_data ; // 出力Yの保持変数(32点数分)
// Arduino 起動時呼び出しプログラム
void setup(){
for (byte i=0; i<sizeof(in_no); i++) {
pinMode(in_no[i],INPUT);
}
for (byte i=0; i<sizeof(out_no); i++) {
pinMode(out_no[i],OUTPUT);
}
}
// Arduino 繰り返しプログラム
void loop(){
output_update();
input_update();
////////////////////////
// スキャンプログラム //
////////////////////////
if (GET_X(X0021,21)){
SET_Y_ON(Y0019,19);
} else {
SET_Y_OFF(Y0019,19);
}
if (GET_X(X0022,22)){
SET_Y_ON(Y0025,25);
} else {
SET_Y_OFF(Y0025,25);
}
////////////////////////
output_update();
}
// standard function
// 入力情報の更新関数
void input_update() {
in_data = 0;
for (byte i=0; i<sizeof(in_no); i++) {
if (digitalRead(in_no[i])==LOW) {
in_data = in_data & ~(0x01 << i);
} else {
in_data = in_data | (0x01 << i);
}
}
}
// 出力情報の更新関数
void output_update() {
for (byte i=0; i<sizeof( out_no ); i++) {
if ( out_data & (0x01 << i) ) {
digitalWrite( out_no[i], HIGH );
} else {
digitalWrite( out_no[i] , LOW );
}
}
}
こちらのプログラム長いですね。
入出力のプログラムはシステム部分です。
本来のラダー部は以下の部分です。
if (GET_X(X0021,21)){
SET_Y_ON(Y0019,19);
} else {
SET_Y_OFF(Y0019,19);
}
if (GET_X(X0022,22)){
SET_Y_ON(Y0025,25);
} else {
SET_Y_OFF(Y0025,25);
}